ラグラジアンの求め方:3次元極座標(球座標)
カテゴリー:力学
3次元極座標におけるラグラジアン\( {\cal L} \)を求める。 運動エネルギー\( T\)は、\(x,\ y, z\)で表される3次元の直交座標において、
\begin{eqnarray} T = \frac{1}{2} m \left( \dot{x}^2 + \dot{y}^2 \right)\ \ \ \ \ \ \ \ \ \ \ \ \ (1) \end{eqnarray}
である。では、直交座標と\( r,\ \theta, \phi\)で表される3次元極座標の関係から変換していこうと思う。 3次元直交座標系と極座標系の関係は
\begin{eqnarray} x &=& r \sin \theta \cos \phi \\ y &=& r \sin \theta \sin \phi \\ z &=& r \cos \theta \end{eqnarray}
である。これらを時間で微分すると、
\begin{eqnarray} \dot{x} &=& \dot{r}\sin\theta\cos\phi + r\dot{\theta}\cos\theta\cos\phi - r\dot{\phi}\cos\theta\sin\phi \ \ \ \ \ \ \ \ (2)\\ \dot{y} &=& \dot{r}\sin\theta\sin\phi + r\dot{\theta}\cos\theta\sin\phi + r\dot{\phi}\sin\theta\cos\phi \ \ \ \ \ \ \ \ \ \ (3) \\ \dot{z} &=& \dot{r} \cos \theta - r \dot{\theta}\sin\theta \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (4) \end{eqnarray}
となる。この式(2), (3), (4)を式(1)に代入すると、ものすごくめんどうな計算を経て、以下を得るのである。
\begin{eqnarray} T = \frac{1}{2} m \left( \dot{r}^2 + r^2 \dot{\theta}^2 + r^2\dot{\phi}^2\sin^2\theta\right)\ \ \ \ \ \ \ \ \ (5) \end{eqnarray}
これにより、3次元極座標のラグラジアン
\begin{eqnarray} {\cal L} = T - U = \frac{1}{2} m \left( \dot{r}^2 + r^2 \dot{\theta}^2 + r^2\dot{\phi}^2\sin^2\theta\right) - U\ \ \ \ \ \ \ \ \ (6) \end{eqnarray}
を得るのである。でもこの方法だと、計算がかなりめんどうである。式(2), (3), (4)を式(1)に代入する段階で、20項くらい出てくることになってしまい、 まとめるのすら辛い。
運動エネルギーを得るのが最もめんどうなので、次に線要素という考え方を使って、もっと簡単に求めてみる。
線要素から運動エネルギーを求める
2次元極座標での線要素から運動エネルギーを求める方法とほとんど変わらないが、ここでも詳しく説明していく。
線要素とは微小時間に物体が運動する微小距離のベクトルである。 つまり、微小時間にどの方向にどれだけ移動するのかが線要素である。
線要素を時間微分することで、速度を求めることができる。つまり、線要素を\( d {\bf l} \)とすると、
\begin{eqnarray} T =\frac{1}{2}m v^2 = \frac{1}{2}m \left( \frac{d {\bf l}}{dt} \right)^2\ \ \ \ \ \ \ \ \ \ (7) \end{eqnarray}
の関係がある。ではまず線要素を求めていく。
\(r,\ \theta,\ \phi\)の各成分の微小時間における変化量は\( dr,\ d\theta,\ d\phi\)である。
\( dr \)は距離であるが、残りの2つは角度であるので、3次元極座標上での距離に書き直してやる必要があり、それはそれぞれ\( rd\theta,\ r\sin\theta d\phi \)である。
各成分の微小時間に進む距離に単位ベクトルをかけて、ベクトル表記にすることで、線要素\( d{\bf l}\)は以下のように表される。
\begin{eqnarray} d{\bf l} = dr {\bf e}_r + rd\theta {\bf e}_{\theta} + r\sin\theta d\phi {\bf e}_{\bf \phi}\ \ \ \ \ \ \ \ \ \ (8) \end{eqnarray}
ここで、単位ベクトルは図1を参照して欲しい。
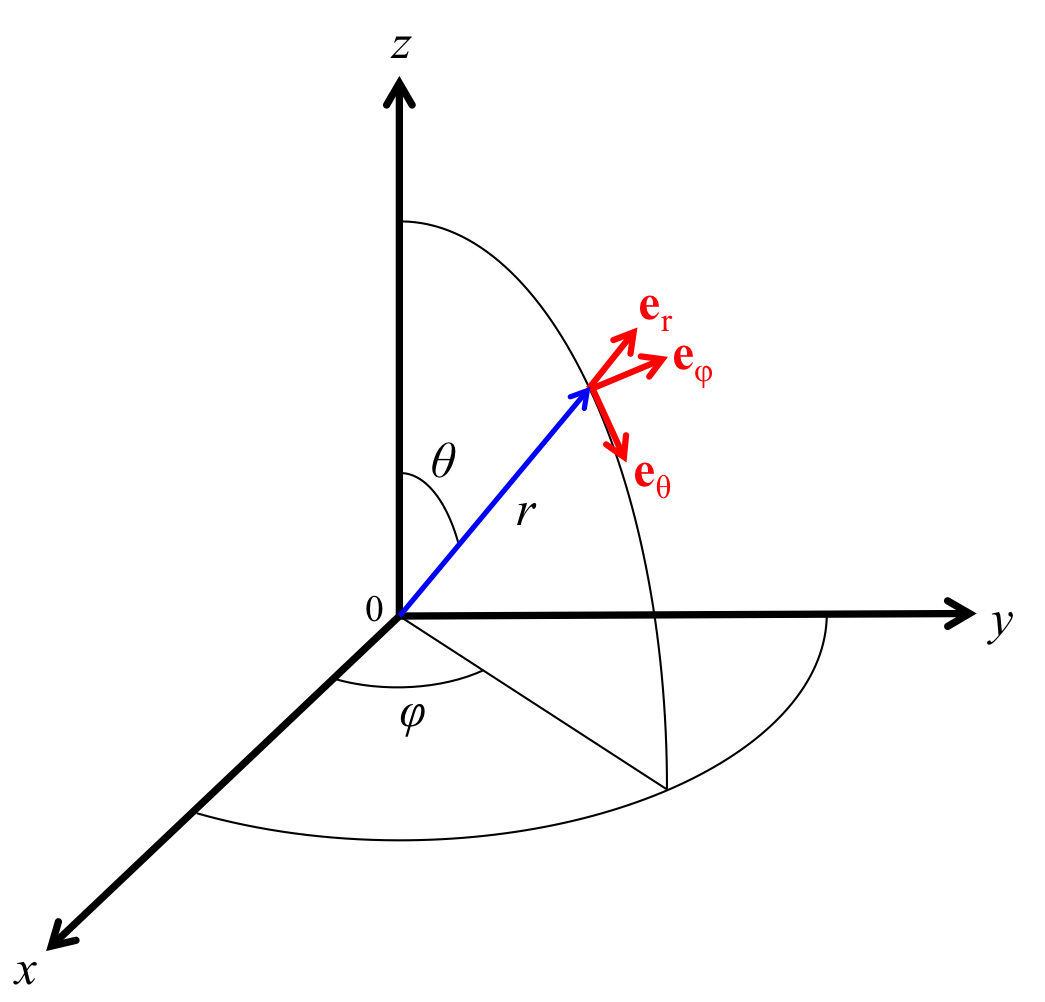
図1 極座標
式(8)の線要素を微分し速度を得ると、
\begin{eqnarray} \frac{d{\bf l}}{dt} = \frac{dr}{dt} {\bf e}_r + r \frac{d\theta}{dt} {\bf e}_{\theta} + r\sin\theta \frac{d\phi}{dt} {\bf e}_{\bf \phi}\ \ \ \ \ \ \ \ \ \ (8) \end{eqnarray}
を得る。これを2乗し、式(7)に代入したいところだが、式(8)ベクトルであるので、両辺を2乗するのではなく、各成分を2乗する必要がある(三平方の定理)。 つまり、
\begin{eqnarray} \left( \frac{d{\bf l}}{dt} \right)^2 = \left(\frac{dr}{dt} \right)^2 + r \left( \frac{d\theta}{dt}\right)^2 + r\sin\theta \left( \frac{d\phi}{dt} \right)^2 \ \ \ \ \ \ \ \ \ \ (9) \end{eqnarray}
となる。よって、運動エネルギー\(T\)は
\begin{eqnarray} T = \frac{1}{2} m \left( \dot{r}^2 + r^2 \dot{\theta}^2 + r^2\dot{\phi}^2\sin^2\theta\right)\ \ \ \ \ \ \ \ \ (10) \end{eqnarray}
と導くことができる。これは、式(5)と同じである。このように線要素という考え方を使えば、 運動エネルギー直交座標と極座標の関係から求めるよりかなり簡単に求めることができるのである。