レーダーの概要
カテゴリー:レーダー技術
レーダー(Radar)とは、Radio detection and rangingから作られた言葉である。
電波(radio)によって遠方の対象物を検出(detection)し、その方向と距離を測る(ranging)という意味なのである。
人間の目は対象物から照射、反射、散乱した光を受けている。
人間の目は、自分から光は発していないが、対象物からの光(電磁波)を受光している点はレーダーと似ている。
光は、雲や煙など光を吸収、散乱するものが間にあると、向こう側を見ることができないが、電波は雲の中も煙の中も直進することができる。
よって、気象条件などに左右されず定常的に遠方のものを観測したい場合は、電波を使うレーダーでものを探査することが多いのである。
さらにレーダーは、受信される信号のドップラー成分を検出することで、物体の速度を計測することができるのである。
レーダーはずっと連続で電波を出しているわけではなくパルス波を使い探知している。
もし、絶えず電波を出していたら受信される電波が、いつ発せられたかわからなくなってしまうからである。
これでは目標の位置を検知できるレーダーの利点が全くなくなってしまう。
レーダーはパルスと呼ばれる短い時間幅の瞬間的な信号を発する。
目標から帰ってきたパルスを受信することで、パルスを送信した時間と受信した時間の差から目標までの距離を知ることができるのである。
このようなレーダーをパルスレーダーと呼び、その概要を図1に示す。
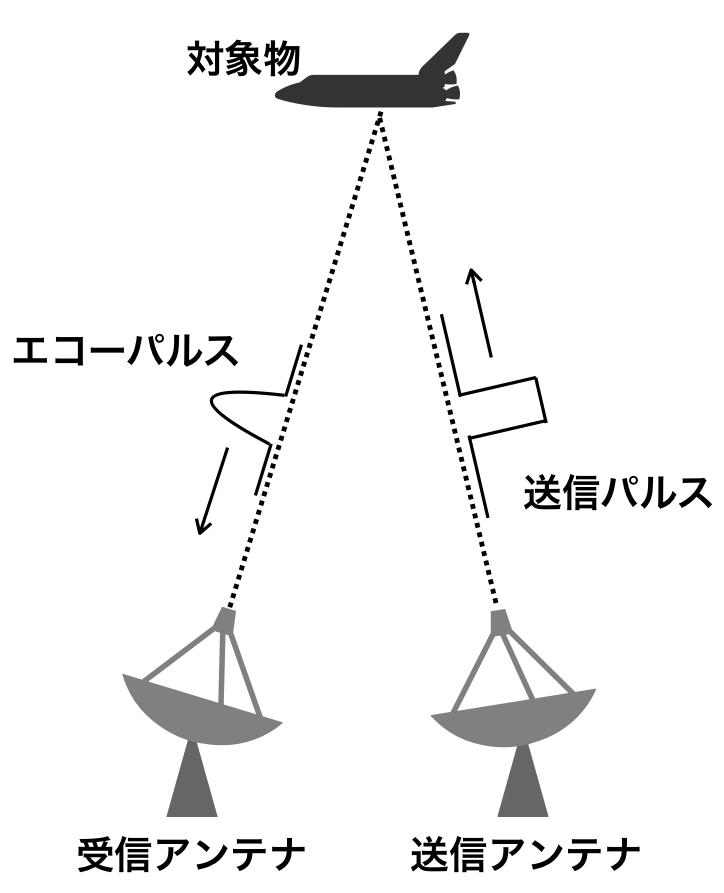
図1. レーダーの原理
レーダーの基本的な構成は、送信アンテナ、受信アンテナ、送信機、受信機、指示器から成る。
特殊な場合を除いて送信アンテナと受信アンテナは同じである場合が多い。
短時間のパルスは送信用アンテナを使って、ある方向に指向性を持って送信される。
目標に当たった電波は四方八方に電波を再放射する。
この再放射された電波を受信アンテナで受信するのである。
このように、送信した電波のほとんどは帰って来ず、微弱な目標から再放射された電波(エコーパルス)を受信しているのである。
このため、より精度よく電波を受信するには、たくさんの微弱なエコーパルスを集める必要があるため大きなアンテナが必要となる。
目標物までの距離は、パルスを送信アンテナから送信し、目標に到達し、再放射され、受信アンテナでそのエコーパルスを受信するまでの時間\( \Delta t\)から求めることができる。
\( \Delta t\)はアンテナと目標物の間を往復する時間であるので、アンテナから目標までの距離を\( R \)とすると、
\begin{eqnarray} R = \frac{c\Delta t}{2} \ \ \ \ \ \ \ \ \ \ \ \ (1) \end{eqnarray}
と表される。ここで、\( c \)は光の速度である(電波は高速で進む)。
また、送信アンテナと受信アンテナは同じであると仮定した。
式(1)を使うと、目標からのエコーパルスを受信するまでの時間は、
\begin{eqnarray} \Delta t = \frac{2R}{c} \ \ \ \ \ \ \ \ \ \ \ \ (2) \end{eqnarray}
で表される。
レーダーはパルスを送信すると、エコーパルスが受信されるまでの間である時間\( \Delta t \)は次のパルスを送信しない。
もし、パルスを送信してから次のパルスを送信するまでの時間を\( \Delta t \)より小さくすると、目標からのエコーパルスは、 次のパルスを送信した後に受信されることになり、見かけ上レーダーの近傍に目標があるように勘違いしてしまう。
こういった間違いを引き起こすパルスのことを2次パルスと呼ばれる。
また、パルスを送信してから次のパルスを送信するまでの周期のことを繰り返し周期または繰り返し周波数と呼ぶ。
繰り返し周期が短ければ短いほど単位時間に多くのパルスを送信することができるので、できるだけ繰り返し周期を短くする。
2次以上のエコーが発生しないぎりぎりの繰り返し周波数を求めるのである。
エコーパルスを受信してからすぐに次のパルスを送信することが最も効率的な観測であるので、 いま観測したい最も遠い目標までの距離を\( R_L\)、繰り返し周期を\( T \)、繰り返し周波数を\( f_r \)とすると、
\begin{eqnarray} R_L = \frac{cT}{2} = \frac{c}{2f_r}\ \ \ \ \ \ \ \ \ \ \ \ (3) \end{eqnarray}
で、最も効率的な繰り返し周波数、周期を求めることができる。
ここで、\( T = 1 / f_r \)である。
このようにして、レーダーが送信する繰り返し周波数を決める時は、そのレーダーで観測したい最も遠くにある目標までの距離から決めることも多い。
アンテナから電波を四方八方に送信する場合を考える。
もし、目標がある方向に電波を送信したとき、強いエコーパルスが観測されたとする。
このようにして、目標の方向を同定するのである。
目標が運動している時は、エコーパルスの周波数が目標の速度に応じてドップラーシフトする。
ドップラーシフトとは、光や音のような波を発する物体が移動するとき、送波する側と受波する側との相対的速度差によって、 周波数がシフトする現象である。または、ドップラー効果ともいう。
目標が速度\( V \)で運動していたとすると、ドップラー周波数\( f_d \)は、
\begin{eqnarray} f_d = \frac{2V}{\lambda}\ \ \ \ \ \ \ \ \ \ \ \ (4) \end{eqnarray}
と表される。つまり、速度\( V \)で運動する目標からのエコーパルスは\( f_d \)だけずれる。
この\( f_d \)を観測することで目標のアンテナとの相対速度を求めることができる。
世界最大級のオンライン学習サイトUdemy