回転座標系
回転運動
図3-20のように空間に固定されているO-\( xyz \)座標系を考える。直行座標系O-\( xyz \)の単位直交ベクトルを\( {\bf i} \), \( {\bf j} \),\( {\bf k} \)とする。 次に、原点Oのまわりを回転するもう1つの座標系O-\( x’y’z’ \)を考える。 この回転している座標系O-\( x’y’z’ \)の単位直交ベクトルを\( {\bf i}’ \), \( {\bf j}’ \),\( {\bf k}’ \)とする。 いくら時間が経っても、2つの座標系の原点は常に共通してOであるとする。 ここで、\( {\bf i}’ \), \( {\bf j}’ \),\( {\bf k}’ \)はそれぞれ時間と共に変化するので、時間の関数として \begin{eqnarray} {\bf i}’ &=& {\bf i}’ (t) \\ {\bf j}’ &=& {\bf j}’ (t)\ \ \ \ \ \ \ \ \ \ \ \ (3.10.1) \\ {\bf k}’ &=& {\bf k}’ (t) \\ \end{eqnarray} と表せるとする。
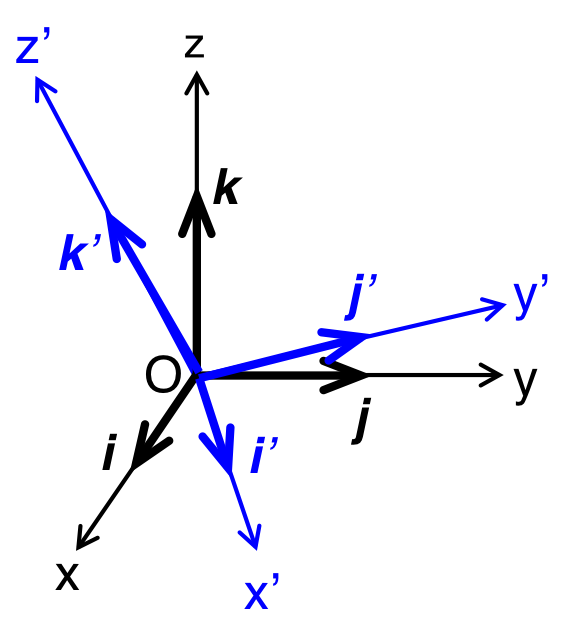
図3-20 空間に固定された座標と回転する座標
微小時間\( \Delta t \)後の運動とは、 \begin{eqnarray} \left( \begin{array}{c} {\bf i}’ (t+\Delta t) \\ {\bf j}’ (t+\Delta t) \\ {\bf k}’ (t+\Delta t) \\ \end{array} \right) =A(t) \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right)\ \ \ \ \ \ \ \ \ \ \ \ (3.10.2) \end{eqnarray} の関係性がある。\( A \)は3行3列の直交行列である、 もし、\( \Delta t = 0\)である場合、 \begin{eqnarray} \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right) = \left( \begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{array} \right) \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right) = I \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right)\ \ \ \ \ \ \ \ \ \ \ \ (3.10.3) \end{eqnarray} となり、行列\( A \)は単位行列\( I \)と等しくなる。 よって、微小時間\( \Delta t \)に対して、行列Aは、新しい行列Bを使って \begin{equation} A(t) = I + B \Delta t \ \ \ \ \ \ \ \ \ \ \ \ (3.10.4) \end{equation} とすることができる。ここで、行列Bの性質が今後重要になってくるので、少し、行列Bについて確認しておく。 行列Aは直交行列であるので、転置行列\( A^{\mathrm{T}} \)を用いて、\( I = AA^{\mathrm{T}} \)が成り立つ。 よって、 \begin{equation} I = AA^{\mathrm{T}} = (I+B\Delta t)(I+B^{\mathrm{T}} \Delta t)= I + (B+B^{\mathrm{T}}) \Delta t\ \ \ \ \ \ \ \ \ \ \ \ (3.10.5) \end{equation} の関係性がある。さらに、\( B^{\mathrm{T}} = - B \)の関係性が導かれる。 つまり、行列\( B \)は交代行列であるので、行列\( B \)は \begin{equation} B = \left( \begin{array}{c} 0 & B_3 & -B_2 \\ -B_3 & 0 & B_1 \\ -B_2 & -B_1 & 0 \\ \end{array} \right)\ \ \ \ \ \ \ \ \ \ \ \ (3.10.6) \end{equation} の形を取る。
ここで、元の話に戻る。\( {\bf i}’,\ {\bf j}’, {\bf k}’ \)の時間微分は以下のようであることがわかる。 \begin{eqnarray} \frac{d}{dt} \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right) &=& \lim_{\Delta t \to 0} \left\{ \left( \begin{array}{c} {\bf i}’ (t + \Delta t) \\ {\bf j}’ (t + \Delta t) \\ {\bf k}’ (t + \Delta t) \\ \end{array} \right) - \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right) \right\} \\ &=& \lim_{\Delta t \to 0} \frac{1}{\Delta t} (A-I) \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right) \\ &=& B \left( \begin{array}{c} {\bf i}’ (t) \\ {\bf j}’ (t) \\ {\bf k}’ (t) \\ \end{array} \right)\ \ \ \ \ \ \ \ \ \ \ \ (3.10.7) \end{eqnarray} ここで、交代ベクトルBを \begin{equation} B = \left( \begin{array}{c} 0 & \omega_3 & -\omega_2 \\ -\omega_3 & 0 & \omega_1 \\ -\omega_2 & -\omega_1 & 0 \\ \end{array} \right)\ \ \ \ \ \ \ \ \ \ \ \ (7) \end{equation} とおく。 \begin{equation} {\bf \omega} = \omega_1 {\bf i}’ + \omega_2 {\bf j}’ + \omega {\bf k}’ \ \ \ \ \ \ \ \ \ \ \ \ (3.10.8) \end{equation} は回転座標系O-\( x’,y’,z’ \)の角速度ベクトルという。 角速度ベクトルを用いて、 \begin{eqnarray} \frac{d}{dt}{\bf i}’ &=& {\boldsymbol \omega} \times {\bf i}’ \\ \frac{d}{dt}{\bf j}’ &=& {\boldsymbol \omega} \times {\bf j}’ \ \ \ \ \ \ \ \ \ \ \ \ (3.10.9) \\ \frac{d}{dt}{\bf k}’ &=& {\boldsymbol \omega} \times {\bf k}’ \end{eqnarray} と表すことができる。
ここまでわかったところで、固定座標系O-\( xyz \)と回転座標系O-\( x’y’z’ \)間の関係性を見てみる。 ベクトル\( {\bf P} (t) \)は2つの座標系間で以下の様に表すことができるとする。 \begin{align} {\bf P} (t) &=&P_x {\bf i} + P_y {\bf j} + P_z{\bf k} &\ \ \ \ \ \ \ \ \ \ \ \ (3.10.10)\\ &=&P_{x’} {\bf i}’ + P_{y’} {\bf j}’ + P_{z’} {\bf k}’ &\ \ \ \ \ \ \ \ \ \ \ \ (3.10.11) \end{align} 固定座標系O-\( xyz \)での\( {\bf P}(t) \)の時間微分\( \left( \frac{dP(t)}{dt} \right)_f \)は \begin{equation} \left( \frac{d{\bf P}(t)}{dt} \right)_f = \frac{dP_x}{dt} {\bf i} + \frac{dP_y}{dt} {\bf j} + \frac{dP_z}{dt} {\bf k}\ \ \ \ \ \ \ \ \ \ \ \ (3.10.12) \end{equation} 回転座標系O-\( x’y’z’ \)での\( {\bf P}(t) \)の時間微分\( \left( \frac{dP(t)}{dt} \right)_r \)は \begin{equation} \left( \frac{d{\bf P}(t)}{dt} \right)_r = \frac{dP_{x’}}{dt} {\bf i}’ + \frac{dP_{y’}}{dt} {\bf j}’ + \frac{dP_{z’}}{dt} {\bf k}’\ \ \ \ \ \ \ \ \ \ \ \ (3.10.13) \end{equation} であるとする。ここで考えた時間微分はそれぞれの座標系で時間微分を行っているので、それぞれの単位ベクトルの時間微分は0となることに注意する。 式(3.10.10)と式(3.10.11)を固定座標系で時間微分すると \begin{eqnarray} \left( \frac{d{\bf P}(t)}{dt} \right)_f &=& \frac{dP_x}{dt} {\bf i} + \frac{dP_y}{dt} {\bf j} + \frac{dP_z}{dt} {\bf k} \\ &=& \frac{dP_{x’}}{dt} {\bf i}’ + \frac{dP_{y’}}{dt} {\bf j}’ + \frac{dP_{z’}}{dt} {\bf k}’ \\ & & + P_{x’}\frac{d{\bf i}’}{dt} + P_{y’}\frac{d{\bf j}’}{dt} + + P_{z’}\frac{d{\bf k}’}{dt}\ \ \ \ \ \ \ \ \ \ \ \ (3.10.14) \end{eqnarray} となる。繰り返しになるが、固定座標系で時間微分しているので、\({\bf i},\ {\bf j},\ {\bf k}\)の時間微分は0になるが、 \({\bf i}’,\ {\bf j}’,\ {\bf k}’\)の時間微分は0にならない。式(3.10.9)と式(3.10.14)から以下の関係を得る。 \begin{eqnarray} \left( \frac{d{\bf P}(t)}{dt} \right)_f &=& \left( \frac{d{\bf P}(t)}{dt} \right)_r + P_{x’} ({\boldsymbol\omega} \times {\bf i}’) + P_{y’} ({\boldsymbol \omega} \times {\bf j}’) + P_{z’} ({\boldsymbol \omega} \times {\bf k}’) \\ &=& \left( \frac{d{\bf P}(t)}{dt} \right)_r + {\boldsymbol \omega} \times {\bf P} \end{eqnarray} これは固定座標系の時間微分\( \left( \frac{d{\bf P}(t)}{dt} \right)_f \)が回転座標系の時間微分\( \left( \frac{d{\bf P}(t)}{dt} \right)_r \)と座標が回転することによる寄与である\( {\boldsymbol \omega} \times {\bf P} \)の2つの部分から成り立っていることを意味している。 回転座標系は座標変換の基礎で、頻繁に出てくるので、この関係式を覚えておいた方が良い。