円錐ばね振り子
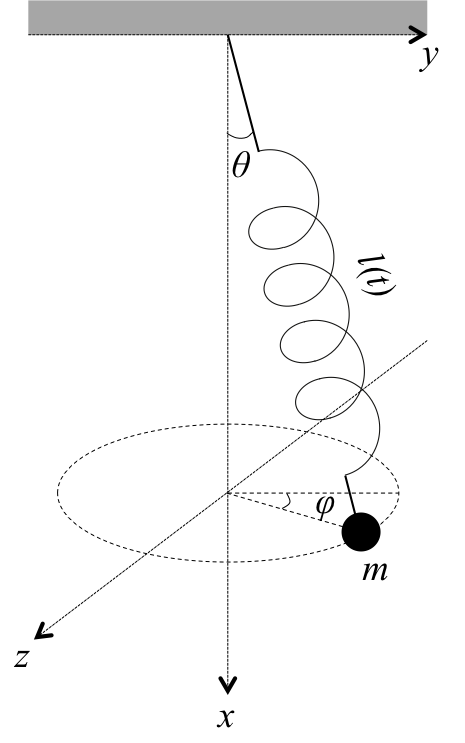
図2-7 円錐ばね振り子
ばね振り子の場合の応用である。
運動エネルギー\( T \)は
\begin{equation}
T = \frac{1}{2} m \left( \dot{x}^2 + \dot{y}^2 + \dot{z}^2 \right)
\end{equation}
である。ここで
極座標系を用いる。
図に示された座標系においては、
\begin{eqnarray}
x &=& l \cos \theta \\
y &=& l \sin \theta \cos \phi \\
z &=& l \sin \theta \sin \phi
\end{eqnarray}
である。本問題は計算は簡単であるがややこしいので、丁寧に展開してく。
\( x, y, z\)の時間微分、\(\dot{x}, \dot{y}, \dot{z}\)は
\begin{eqnarray}
\dot{x} &=& \dot{l} \cos \theta - l \dot{\theta} \sin \theta \\
\dot{y} &=& \dot{l} \sin \theta \cos \phi + l \dot{\theta} \cos \theta \cos \phi - l \dot{\phi} \sin \theta \sin \phi \\
\dot{z} &=& \dot{l} \sin \theta \sin \phi + l \dot{\theta} \cos \theta \sin \phi + l \dot{\phi} \sin \theta \cos \phi
\end{eqnarray}
となる。さらにそれぞれの二乗、
\begin{eqnarray}
\dot{x}^2 &=& \dot{l}^2\cos^2\theta - 2l\dot{l}\dot{\theta}\cos\theta\sin\theta +l^2\dot{\theta}^2\sin^2\theta\\
\dot{y}^2 &=& \dot{l}^2\sin^2\theta\cos^2\phi + l^2\dot{\theta}^2\cos^2\theta\cos^2\phi + l^2\dot{\phi}^2 \sin^2\theta\sin^2\phi
+ 2l\dot{l}\dot{\theta}\sin\theta\cos\theta\cos^2\phi - 2l\dot{l}\dot{\phi}\sin^2\theta\sin\phi\cos\phi
- 2l^2\dot{\theta}\dot{\phi}\sin\theta\cos\theta\sin\phi\cos\phi \\
\dot{z}^2 &=& \dot{l}^2\sin^2\theta\sin^2\phi + l^2\dot{\theta}^2\cos^2\theta\sin^2\phi + l^2\dot{\phi}^2\sin^2\theta\cos^2\phi
+ 2l\dot{l}\dot{\theta}\sin\theta\cos\theta\sin^2\phi + 2l\dot{l}\dot{\phi}\sin^2\theta\sin\phi\cos\phi
+ 2l^2\dot{\theta}\dot{\phi}\sin\theta\cos\theta\sin\phi\cos\phi
\end{eqnarray}
が得られ、和をとると、
\begin{eqnarray}
\dot{x}^2 + \dot{y}^2 + \dot{z}^2 = \dot{l}^2 + l^2\dot{\theta}^2 + l^2\dot{\phi}^2\sin^2\theta
\end{eqnarray}
となる。ここで、本問題では\(\theta\)が時間により一定であるので、\( \dot{\theta}=0 \)である。(これをもっと先に適応すれば、計算が楽であるが今回は展開の練習も兼ねてすべての変数に対して微分した。)
よって、運動エネルギー\(T\)は
\begin{equation}
T = \frac{1}{2} m \left( \dot{l}^2 + l^2\dot{\phi}^2\sin^2\theta \right)
\end{equation}
と変形できる。
ポテンシャル・エネルギー\(U\)は簡単に求める事ができて、
\begin{equation}
U = -mgl\cos\theta + \frac{1}{2} k \left( l_0 - l \right)^2
\end{equation}
である。よって、ラグラジアン\( {\cal L} \)は、
\begin{equation}
{\cal L} = T - U = \frac{1}{2} m \left( \dot{l}^2 + l^2\dot{\phi}^2\sin^2\theta \right) + mgl\cos\theta - \frac{1}{2} k \left( l_0 - l \right)^2
\end{equation}
と表される。このラグラジアンをラグランジュ方程式に代入するのだが、
ラグラジアンから\(l\)についてのラグランジュ方程式が立つ。
\begin{eqnarray}
\frac{d}{dt} \left( \frac{\partial {\cal L}}{\partial \dot{l}} \right) &=& \frac{\partial {\cal L}}{\partial l}
\end{eqnarray}
より、円錐ばね振り子の運動方程式は
\begin{equation}
m\ddot{l} = ml \dot{\phi}^2 \sin^2 \theta + mg\cos\theta - k(l_0-l)
\end{equation}
と求める事ができる。
広告