減衰振動の解
図1のような摩擦のある面で調和振動をさせると、摩擦によって振動の力学的エネルギーは指数関数的に減少する。 この力学的エネルギーの減少については別の「減衰振動:エネルギーの減少」のページで紹介しているのでそちらを参照して欲しい。 摩擦係数を\( \alpha \)、フックの法則に従うばねのばね係数を\( k\)とすると、図1で示される摩擦のある面でのばねに取り付けられた質点の運動方程式は \begin{eqnarray} m \frac{d^2 x}{dt^2} = -kx - \alpha \frac{dx}{dt}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (1) \end{eqnarray} と表される。
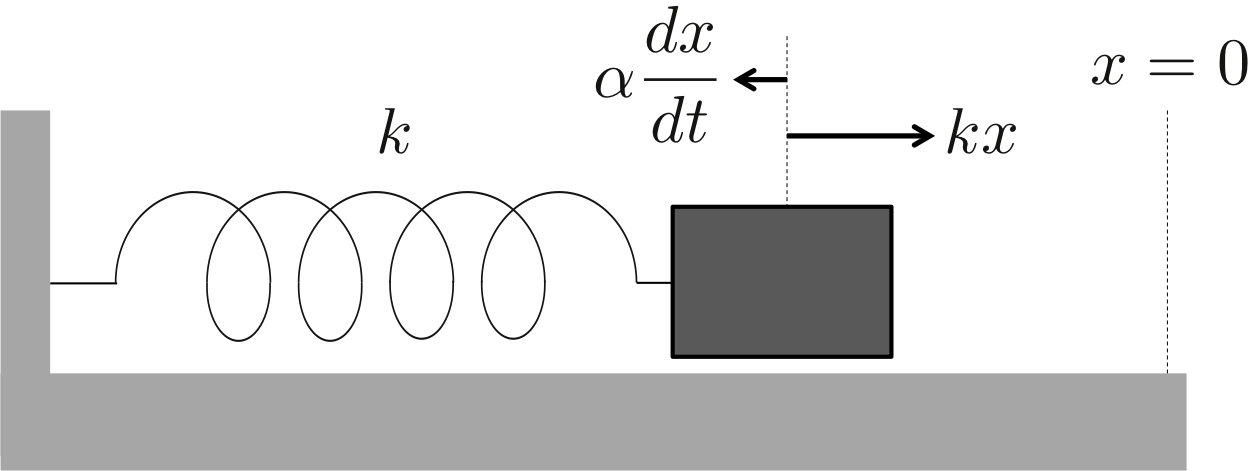
図1. 摩擦のある面でのばねによる調和振動
減衰振動(\(\gamma^2 < \omega_0^2\))
\(\gamma^2 < \omega_0^2\)の場合とは摩擦弱い場合である。 この場合は平方根の中が負になり、\( \exp \)内に虚数が出現する。 このとき、オイラーの公式により\( \exp \)は三角関数に展開できる。 つまり、質点の位置\( x\)が周期的に変化することを示しており、振動することがわかる。 まず、 \begin{eqnarray} \left( \gamma^2 - \omega_0^2 \right)^{1/2} = i \left( \omega_0^2 - \gamma^2 \right)^{1/2} = i \omega \ \ \ \ \ \ \ \ \ \ \ \ \ (8) \end{eqnarray} と置くことで式(7)は以下のように展開することができる。 \begin{eqnarray} x = e^{-\gamma t}\left\{ (A_1 + A_2)\cos\omega t + i (A_1 - A_2)\sin\omega t \right\}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (9) \end{eqnarray} なんだか振動解に近くなってきたするが、慣れていなければこの式が振動解であることはまだわかりにくい。 ではここで、三角関数の合成を行うことで式(9)を書き換える。 すると、 \begin{eqnarray} x = A_0 e^{-\gamma t} \sin(\omega t + \theta)\ \ \ \ \ \ \ \ \ \ \ (10) \end{eqnarray} を得る。ここで、 \begin{align} A_0 &= \sqrt{(A_1 + A_2)^2 - (A_1 - A_2)^2} \\ \theta &= - \frac{A_1 + A_2}{A_1 - A_2}i \end{align} である。式(10)から摩擦が弱い場合には、角振動数\( \omega \)で振動しながら、振幅が時間と共に\( e^{\gamma t} \)で減少することがわかる。 これをプロットしたものを図2に青い線で示す。ただし\( \theta = - \frac{\pi}{2} \)とした。 ちなみに減衰振動の角振動数\( \omega^2 \)は\( \omega_0^2 - \gamma^2 \)で表され、\( \omega_0 \)より小さくなる。 つまり、振動の周期が長くなることを意味している。 これは、摩擦によって振動が遅れてしまうためである。
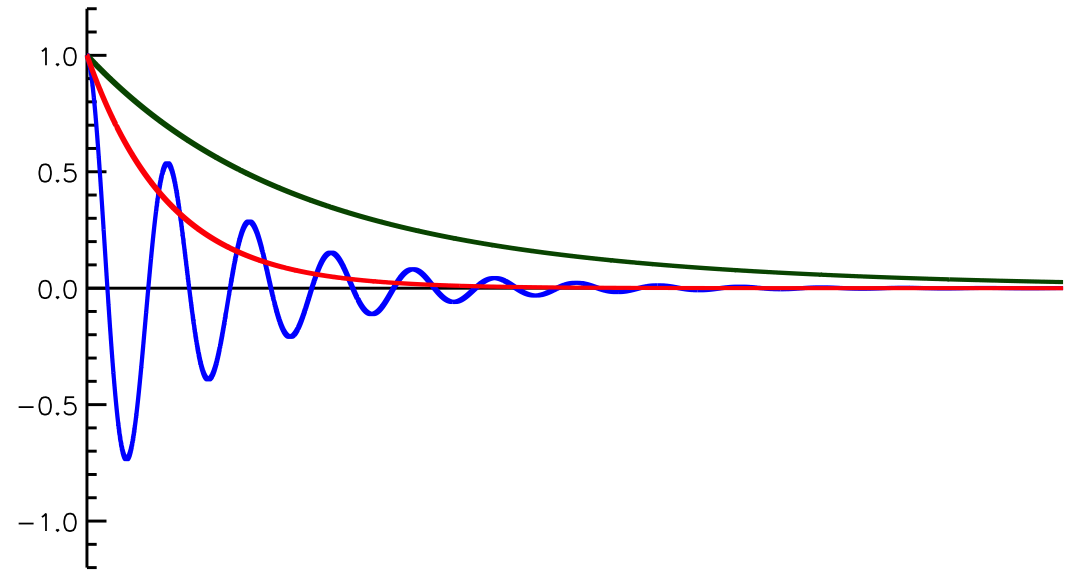
図2. 質点の位置の時間変化。(青)減衰振動、(緑)過減衰、(赤)臨界減衰。
この場合は摩擦が強い場合である。 この時、式(6)で表される\( \lambda \)は負の実数となる。 これはただ単に\(x\)が指数関数的に減少していくことを示しており、振動解ではない。 つまり、もしばねを伸ばした状態から手を離すと物体はゆっくりとばねに引っ張られ、釣り合いの位置で静止していまうのである。 この運動を非周期的減衰または、過減衰と呼ぶ。 過減衰は図2の緑の線で示されている。ゆっくりと釣り合いの位置である\( x=0 \)に収束していく。
臨界減衰(\(\gamma^2 = \omega_0^2\))
この場合は特殊な場合となる。 この時\(x\)は、 \begin{eqnarray} x = (A_1 t + A_2) \exp(-\gamma t) \ \ \ \ \ \ \ \ \ \ \ (11) \end{eqnarray} となる。式(7)の平方根を0としてはいけないことに注意する。 詳しくは定数係数の2階同次微分方程式を再度参照して欲しい。 この場合も同様に振動はしない。 式(11)で示されるような\( x\)の指数関数的な減少を臨界減衰と呼び、最も早く\( x=0\)に収束していくのである。 これは図2の赤線で示されている。
広告